En combinant les dernières technologies de capteurs LIDAR (LIght Detection and Ranging, ou “détection et mesure de la distance par la lumière”) à notre algorithme, les robots Driven by Balyo récupèrent des milliers d’informations relatives à l’environnement du site client pour en déduire leur position en temps réel et se localiser avec une extrême précision. Cette technologie ne nécessite aucune infrastructure additionnelle à l’environnement du client : pas de réflecteur, pas de câble, pas de bande magnétique au sol, rien d’autre que les “yeux” (LIDAR) et le “cerveau” (Intelligence BALYO) du robot.
Les principes de cartographie et de localisation :
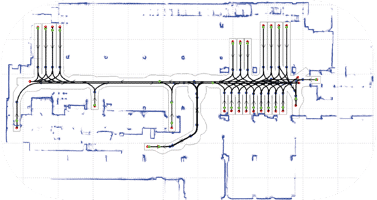
1/ A l’aide d’un robot conduit manuellement par l’un de nos opérateurs, nous cartographions (grâce au LIDAR) la zone de travail des chariots et enregistrons chaque élément qui structure votre site : murs, rayonnages, colonnes et machines.
2/ Nous créons, grâce à nos outils d’installation, le circuit des robots : zones de navigation, routes, points de prise/pose, zone de charge etc. Cette carte est ensuite enregistrée dans la mémoire du robot : c’est la carte de référence.
3/ Un fois votre installation terminée et les robots mis en production, le principe est simple : Lors de ses déplacements, le robot effectue un balayage à 360° de son environnement grâce au LIDAR. Il peut ainsi comparer ce qu’il voit (à l’aide du LIDAR) à ce qu’il connaît (la carte de référence). Grâce à ce procédé (SLAM), le chariot autonome peut se localiser en temps réel (SLAM) et connaître sa position exacte.
L’algorithme de Balyo est suffisamment robuste pour fonctionner dans un environnement complexe dont l’infrastructure évolue. Pour plus d’information, nous contacter.